
Javában tart már az a fejlődési folyamat, amely során a gépjárművek kerekeken guruló számítógépekké válnak, ahol már a szoftverek játszák a főszerepet. Miért és hogyan megy végbe mindez?
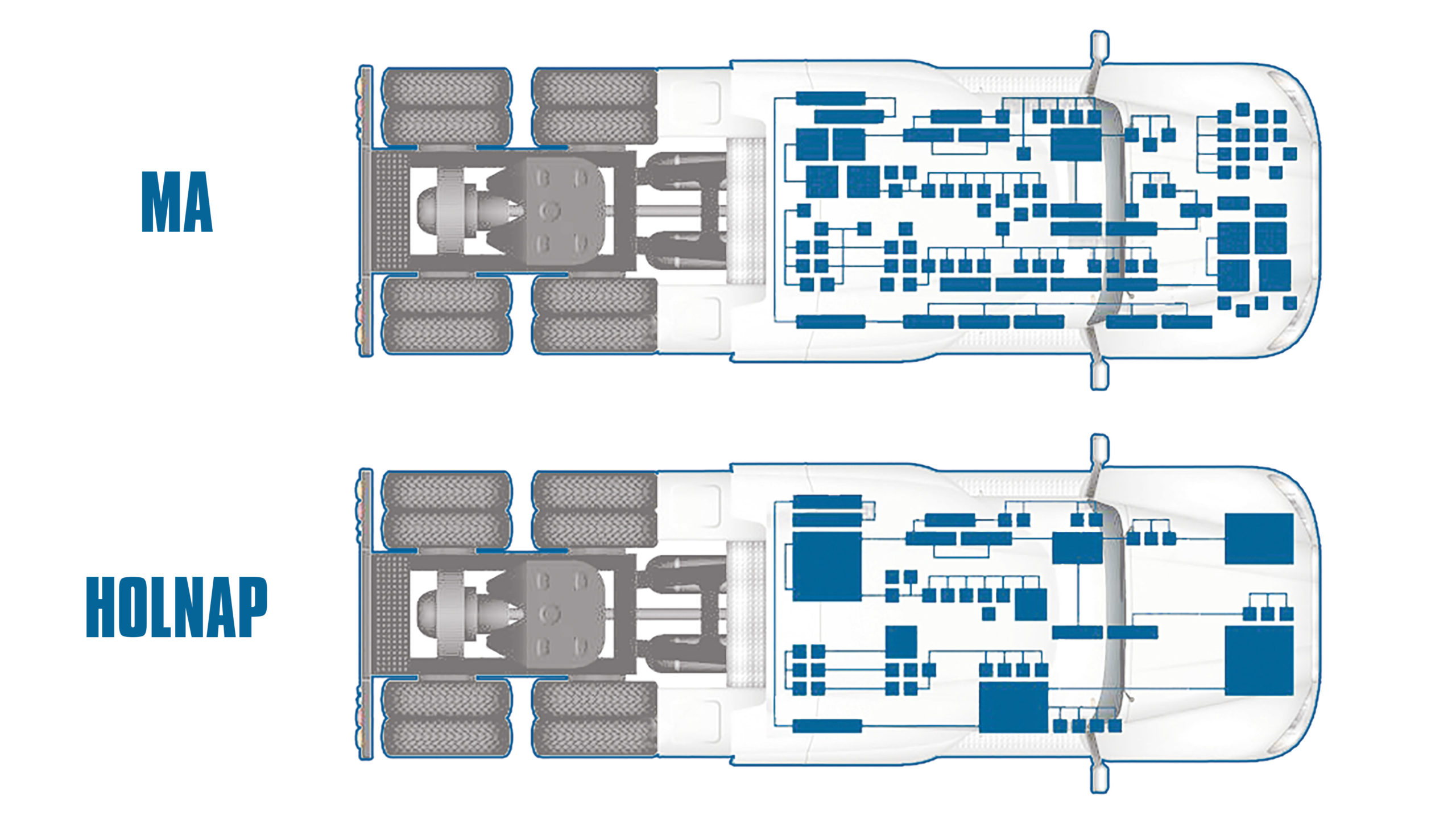
Gombamód szaporodnak a biztonságot, a kényelmet és a hatékonyságot fokozó új funkciók és berendezések a gépkocsikban, legyen szó személyautókról, kishaszonjárművekről vagy nehézhaszonjárművekről. Jóformán minden egyes új képesség egy újabb elektronikus vezérlőegységet (ECU) és jó adag elektromos vezetéket eredményez, még a manapság általánosan használt CAN-adatbuszos elektromos rendszerek esetén is. Ma egy korszerű járműben akár száznál is több ilyen ECU dolgozik egy szövevényes hálózat részeként, többnyire a hozzájuk tartozó hardverek közelében.
Nos, a közeljövő járműipari trendjei, vagyis a villamosítás, az önvezetés, a hálózatba kapcsolás, a járműmegosztás, a távdiagnosztika, valamint az egyre magasabb szintű információs és szórakoztatófunkciók csak egyre több ECU-t igényelnek. Ez az eddigi elektromos és elektronikus hálózatok felépítési sémájával már kezelhetetlenné válna, ezért a fejlesztők új megoldásokon dolgoznak.
Ennek eredményeként egyre több gépjárműben jelennek meg a központosított architektúrák, amelyek esetében egy nagy teljesítményű számítógéphez csatlakozik az összes ECU egy gerinchálózaton keresztül. Ennek felépítését és működését pontosan úgy kell elképzelni, mint az ember központi idegrendszerét az aggyal, a gerincvelővel, az idegpályákkal és az érzékelősejtekkel, illetve izmokkal. Ilyen elektromos és elektronikus szerkezetet kapott például a tavaly bemutatott MAN TG tehergépjármű-család is, felkészülve az évtized új funkcióinak fogadására, beleértve az önvezetést is.
Ám hosszabb távon egy ennél is fejlettebb koncepcióra lesz szükség a gépkocsikban, ez pedig a zónás struktúra. Ennél jellemzően néhány stratégiailag elhelyezett nagy teljesítményű számítógép áll majd összeköttetésben egymással. Ezek egyszerre több feladatot is ellátnak, egy-egy komplett funkcióterületért vagy a jármű egy-egy részéért felelnek. Ezekhez kapcsolódnak majd a kisebb tejesítményű helyi ECU-k, illetve érzékelők és aktuátorok. Az egyszerűbb és átláthatóbb zónás kialakítással jelentősen csökkenthető a teljes elektromos és elektronikus rendszer tömege és helyigénye, hiszen jóval kevesebb ECU és vezeték beépítése szükséges. Ezáltal persze a gyártási költségek is mérsékelhetők, amihez a kábelkötegek beépítésének nagyobb mértékű automatizálhatósága is hozzájárul. Továbbá könnyebb akár harmadik felek szoftvereit beilleszteni, valamint ezeket frissíteni, és új funkciókat telepíteni a járművekbe. Innen pedig már csak egy lépés a szoftvert teljesen függetleníteni a hardvertől, azaz azt „bármilyen” eszközön futtathatóvá tenni és önállóan, központilag fejleszteni. Ez még modulárisabbá teszi a felépítést, és ezáltal még könnyebb az egyéni vagy a sajátos piaci igényekre szabni egy járművet. Ezeknél a szoftver által meghatározott (angolul software-defined) rendszereknél magát az egész járművet már csak egy hardvereszköznek tekintik. Ezek esetében már valóban kereken gördülő szoftverként beszélhetünk az architektúra egészéről. Ha pedig valaki azt gondolja, hogy ez csak afféle utópia, az nagyon téved. A szoftver által meghatározott rendszerek már 2025-től megjelenhetnek a gépkocsikban.






